BoundaryPredictor: Imitating Cost-Minimized Trajectory Sampling for Autonomous Drone Racing
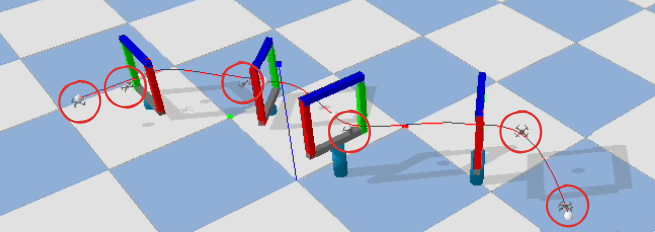
Figure 1. Completion of a gate course in sim using BoundaryPredictor
Motivation
Drone racing traditionally features human FPV drone racers practicing on one specific course and then demonstrating agile flying techniques to complete the course as fast as possible. Similarly, autonomous drone racing research has demonstrated it is possible to get results comparable to humans when allowing an algorithm to learn in this fixed environment over many episodes (Kaufmann et al. (2023)).
My work is motivated by the idea that through observation of a variety of gate courses, we can build a world model for drone racing that generalizes which agile trajectories can solve which gate course setup. In this work, specifically, we do this through repeated sampling of trajectories in simulation to find "optimal" trajectories for a variety of gate courses. This leaves us with a cost-minimized dataset to learn to imitate. We introduce the concept of a weighted loss function which helps push any error in trajectory imitation towards slower-safe trajectories than faster-unsafe trajectories.
BoundaryPredictor in Simulation
Video 1. Accelerating through straight course, max speed 1.3 ms-1
Video 2. Navigating through a curved course, requiring high jerk
BoundaryPredictor in Real Life
Video 3. Navigating through a curved course, requiring high jerk (same course as Video 2 example)
Sim2Real
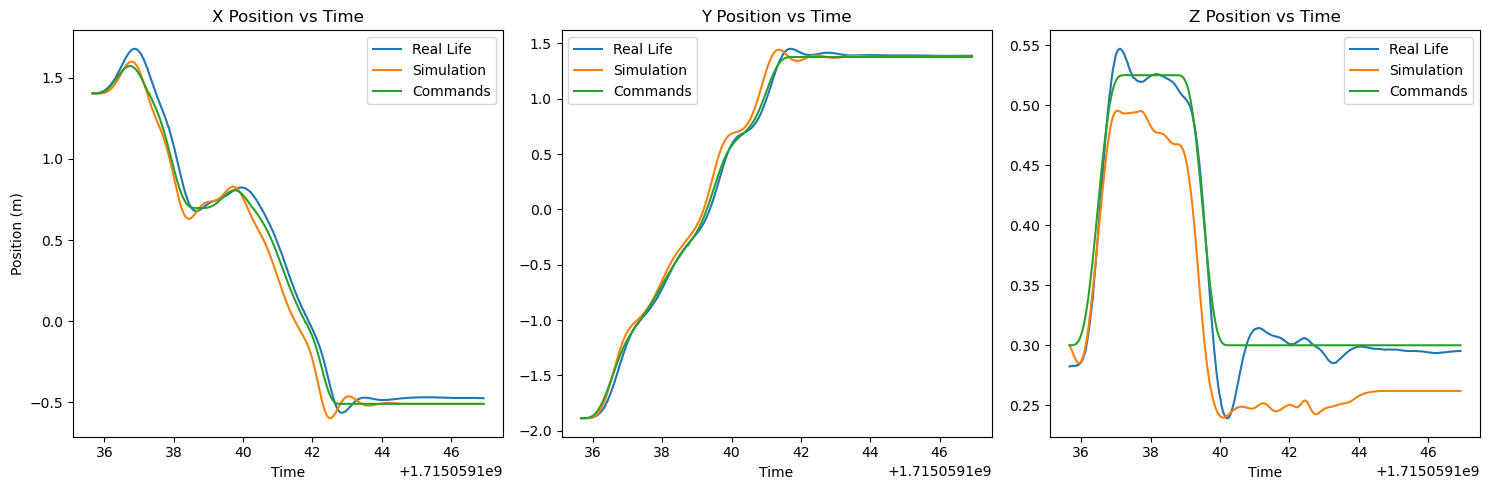
Figure 2: Observed states in Video 2 and 3 compared to commanded state
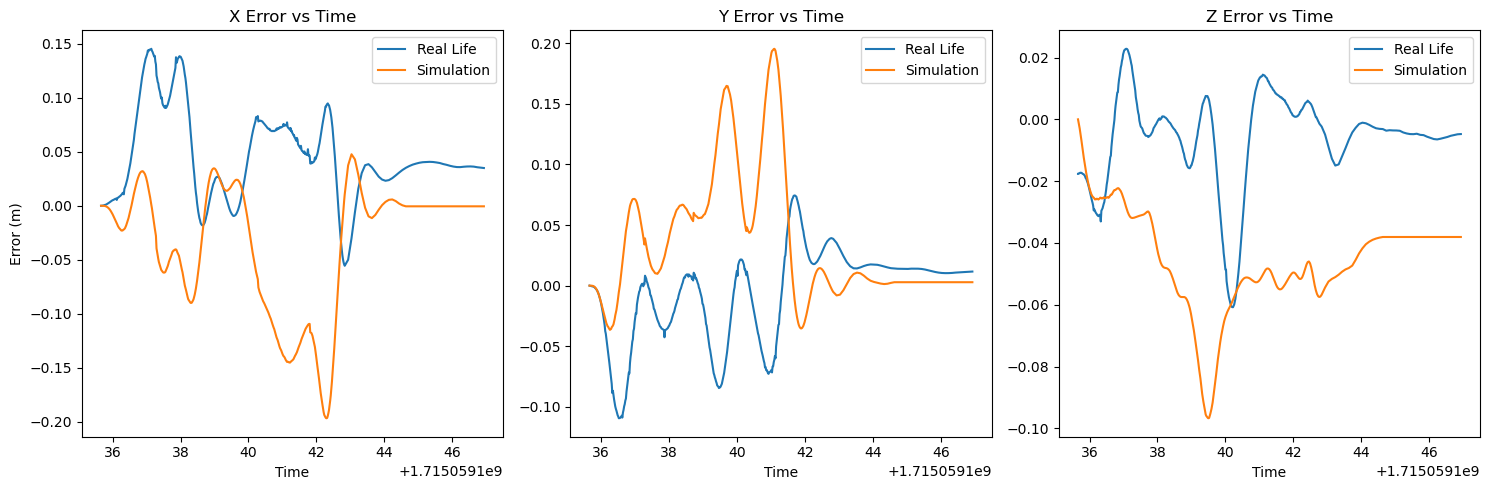
Figure 3. Error in states in Video 2 and 3 compared to commanded state
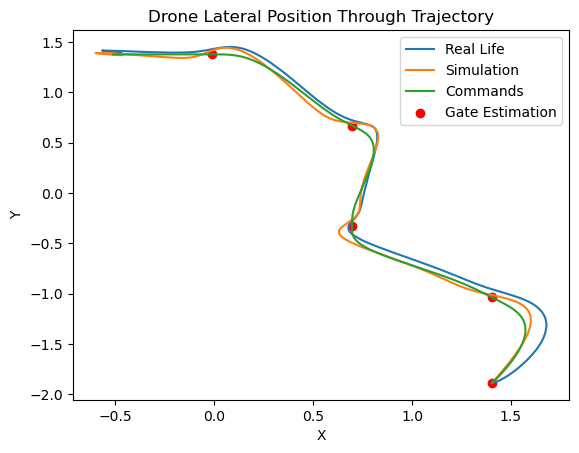
Figure 4. Birds-eye-view of trajectory taken in Video 2 and 3